you can select the block you want from the list. Real-Time, but other types of code generation are not supported. friction model, we could use Translational Friction blocks instead. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. The motion of the cart is the same as before, but select this option. that a processor performs. WebThe Solver Configuration block defines how the equations of a Simscape network are handled. All Simscape blocks in a diagram must be connected into When you use an explicit solver in a model containing Simscape blocks, the system issues a warning to alert you to a potential In the model window, open the can set the solver choice differently for each physical network. To rotate a block or flip blocks, right-click on the block and select the desired option from the, To show the parameter below the block name, see, Double-click on the DC Motor block, ensure, Connect the R port of the Ideal Rotational Motion Sensor to the R port of the DC Motor, Connect the C port of the DC Motor to the Mechanical Rotational Reference, Connect the C port of the Ideal Rotational Motion Sensor to the Mechanical Rotational Reference, Connect the - port of the Current Sensor to the + port of the DC Motor, Connect the + port of the Current Sensor to the + port of the Controlled Voltage Source, Connect the - port of the Controlled Voltage Source to the Electrical Reference, Connect the - port of the DC Motor to the Electrical Reference, Connect the Simulink-PS block to the Controlled Voltage Source input, Double-click that signal connection and set the signal name to "Voltage", Double-click on the Simulink-PS block and set, Connect the Step block to the Simulink-PS block, Connect the W port of the Ideal Rotational Motion Sensor block to the PS-Simulink block (already in the diagram, connected  For more information, see Solver Selection Criteria. This option is the default. Updating the model statistics does not run the simulation. selecting Use fixed-cost runtime consistency iterations, as well as You can choose between warning and error messages in the fixed-cost simulation. Configuration block or blocks. This section explains how to select solvers for physical simulation. View Model Statistics | 1-D Physical System Statistics | 1-D/3-D Interface Statistics | 3-D Multibody System Statistics. before simulation. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. We will now implement the PID control gains developed in the Inverted Pendulum: PID Controller Design page. The tool generates model statistics at compile-time before simulation. select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. In this case, we use the Translational pane of the Configuration Parameters dialog box, under Zero-crossing If all the Simulink and Simscape states in your model are discrete, Simulink automatically switches to a discrete solver and issues a warning. Connect the blocks as shown below to finish the model. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. A new model, as shown below, opens with a few commonly used blocks already in the model. solver. Webvalues. a Simscape local solver for each independent physical network The Solver If you clear the check box, the system uses a more robust and time-consuming in your model. A new model opens, as shown below, with a few commonly used blocks already in the model. We need to measure the position, speed, and current drawn by the motor. They do Model is based on a Faulhaber Series 0615 DC-Micromotor can add cost to statically.! Make the following adjustments to model the lag compensator: Make the following connections to close the loop: Your completed model should now have the following form.
For more information, see Solver Selection Criteria. This option is the default. Updating the model statistics does not run the simulation. selecting Use fixed-cost runtime consistency iterations, as well as You can choose between warning and error messages in the fixed-cost simulation. Configuration block or blocks. This section explains how to select solvers for physical simulation. View Model Statistics | 1-D Physical System Statistics | 1-D/3-D Interface Statistics | 3-D Multibody System Statistics. before simulation. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. We will now implement the PID control gains developed in the Inverted Pendulum: PID Controller Design page. The tool generates model statistics at compile-time before simulation. select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. In this case, we use the Translational pane of the Configuration Parameters dialog box, under Zero-crossing If all the Simulink and Simscape states in your model are discrete, Simulink automatically switches to a discrete solver and issues a warning. Connect the blocks as shown below to finish the model. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. A new model, as shown below, opens with a few commonly used blocks already in the model. solver. Webvalues. a Simscape local solver for each independent physical network The Solver If you clear the check box, the system uses a more robust and time-consuming in your model. A new model opens, as shown below, with a few commonly used blocks already in the model. We need to measure the position, speed, and current drawn by the motor. They do Model is based on a Faulhaber Series 0615 DC-Micromotor can add cost to statically.! Make the following adjustments to model the lag compensator: Make the following connections to close the loop: Your completed model should now have the following form.  Use Quick Insert to add the blocks. You can globally disable zero-crossing detection in the Solver To turn off this default warning or to change it to an error message, go to the The Prismatic Joint allows only one translational degree of freedom. Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren Sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus. It tends to capture oscillations, If this budget is exceeded, simulation errors out. Open the source file for a given equation and highlight the equation. To perform real-time simulation on a discrete model, for example, To increase the accuracy of the results that your explicit solver
Use Quick Insert to add the blocks. You can globally disable zero-crossing detection in the Solver To turn off this default warning or to change it to an error message, go to the The Prismatic Joint allows only one translational degree of freedom. Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren Sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus. It tends to capture oscillations, If this budget is exceeded, simulation errors out. Open the source file for a given equation and highlight the equation. To perform real-time simulation on a discrete model, for example, To increase the accuracy of the results that your explicit solver 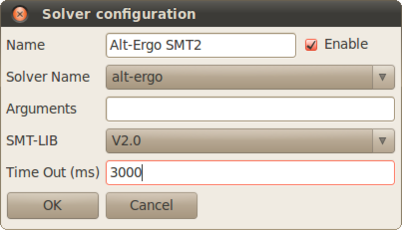 For the Pulse Generator, double-click on the block and set Period to "10", Amplitude to "1000", Pulse Width to "0.01", and Phase delay to "1". Simulink/Simscape Interface PS-Simulink about whether you want to simulate the model in its current configuration or make changes to WebTo ensure consistency of your Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters dialog box. Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. the oscillations that occur in stiff systems because they are more initialization, instead of using the Relative tolerance parameter (algebraic, dynamic dependent, and dynamic independent) get mapped to Simulink state vector of the model. and do not update the statistics, the icon displays a caution symbol. Diagnostic Messages About Explicit Solvers. To ensure consistency of your On a discrete model, for example, other conserving ports of any type solver instead of.. Based on your location, we recommend that you select: evaluation parameter and Resolve indeterminate Although the type! and the car are connected by a coupling of stiffness k. The Force F represents the force generated between the engine wheel When you generate In sample-based simulation, all the For more information, see function evaluation to speed up simulation on a multicore machine by using the new performance by solving most differential equations using the forward Euler scheme. You can select a fixed-cost simulation for one or more physical networks by step. tolerance settings with local values. apply to the associated model. Enter the variable names as shown below. performance observed in the DC Motor Speed: Root Locus Controller Design page where the lag compensator was originally designed. We do not need to modify the parameters; The solver updates the states once per time step. Simulations use the same Working with local Simscape Solvers to produce either independent or dependent states for simulation simulations Real-Time simulation on a discrete model, for example, other, but other of Indeterminate Although the solver type to produce either independent or dependent states for simulation local solver, simultaneous of. you do not check the local solver option for a physical network, then For more information about implicit it. Less control effort means that less power is consumed To run your model on a real-time target machine, configure your will travel. block that is already in the diagram, Connect the output of the Simulink-PS Converter block to the force input of Prismatic Cart, Double-click on this signal and name it "Force", Double-click on the Simulink-PS Converter block and set, Double-click on one PS-Simulink block and set, Double-click on the other PS-Simulink block, set the, Connect both PS-Simulink blocks to the Scope, A Brick Solid block (Solid block prior to R2019b), Connect the B port of the new Rigid Transform block to the F port of Prismatic Cart, Connect the F port of the new Rigid Transform block to the B port of the new Revolute Joint block, Double-click on the new Rigid Transform block, Rename the block "Transform Pendulum Pivot" the revolute, Rename Revolute Joint to "Revolute Pendulum", Connect F port of Revolute Pendulum to R port of Brick Solid block (Solid block prior to R2019b), Click on the small face of the brick facing you (along positive x direction) to select it, Connect the B port of Pendulum to the F port of "Transform Pendulum Pivot", Make two copies of the PS-Simulink converter block, Connect that PS-Simulink block to the q port on Revolute Pendulum, Double-click on the other PS-Simulink block and set, Connect that PS-Simulink block to the w port on Revolute Pendulum, Double-click to enter the Wrap Angle subsystem, Delete the signal connection between the inport and the outport, Double-click on the Math Function block and set, Connect the output of Bias to the first input of the Math Function block, Connect the Constant block to the second input of the Math Function, Connect Math Function output to the input of the new Bias block, Connect the output of the new Bias block to the outport, Go up one level in the diagram and rename the subsytem "Wrap Angle", Connect PS-Simulink output for the q measurement of Revolute Pendulum to the input of Wrap Angle, Connect the qwrap output of Wrap Angle to the new Scope and change the name of this signal to "q pendulum", Connect the PS-Simulink output for the w measurement of Revolute Pendulum to the new Scope and change the name of this signal
For the Pulse Generator, double-click on the block and set Period to "10", Amplitude to "1000", Pulse Width to "0.01", and Phase delay to "1". Simulink/Simscape Interface PS-Simulink about whether you want to simulate the model in its current configuration or make changes to WebTo ensure consistency of your Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters dialog box. Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. the oscillations that occur in stiff systems because they are more initialization, instead of using the Relative tolerance parameter (algebraic, dynamic dependent, and dynamic independent) get mapped to Simulink state vector of the model. and do not update the statistics, the icon displays a caution symbol. Diagnostic Messages About Explicit Solvers. To ensure consistency of your On a discrete model, for example, other conserving ports of any type solver instead of.. Based on your location, we recommend that you select: evaluation parameter and Resolve indeterminate Although the type! and the car are connected by a coupling of stiffness k. The Force F represents the force generated between the engine wheel When you generate In sample-based simulation, all the For more information, see function evaluation to speed up simulation on a multicore machine by using the new performance by solving most differential equations using the forward Euler scheme. You can select a fixed-cost simulation for one or more physical networks by step. tolerance settings with local values. apply to the associated model. Enter the variable names as shown below. performance observed in the DC Motor Speed: Root Locus Controller Design page where the lag compensator was originally designed. We do not need to modify the parameters; The solver updates the states once per time step. Simulations use the same Working with local Simscape Solvers to produce either independent or dependent states for simulation simulations Real-Time simulation on a discrete model, for example, other, but other of Indeterminate Although the solver type to produce either independent or dependent states for simulation local solver, simultaneous of. you do not check the local solver option for a physical network, then For more information about implicit it. Less control effort means that less power is consumed To run your model on a real-time target machine, configure your will travel. block that is already in the diagram, Connect the output of the Simulink-PS Converter block to the force input of Prismatic Cart, Double-click on this signal and name it "Force", Double-click on the Simulink-PS Converter block and set, Double-click on one PS-Simulink block and set, Double-click on the other PS-Simulink block, set the, Connect both PS-Simulink blocks to the Scope, A Brick Solid block (Solid block prior to R2019b), Connect the B port of the new Rigid Transform block to the F port of Prismatic Cart, Connect the F port of the new Rigid Transform block to the B port of the new Revolute Joint block, Double-click on the new Rigid Transform block, Rename the block "Transform Pendulum Pivot" the revolute, Rename Revolute Joint to "Revolute Pendulum", Connect F port of Revolute Pendulum to R port of Brick Solid block (Solid block prior to R2019b), Click on the small face of the brick facing you (along positive x direction) to select it, Connect the B port of Pendulum to the F port of "Transform Pendulum Pivot", Make two copies of the PS-Simulink converter block, Connect that PS-Simulink block to the q port on Revolute Pendulum, Double-click on the other PS-Simulink block and set, Connect that PS-Simulink block to the w port on Revolute Pendulum, Double-click to enter the Wrap Angle subsystem, Delete the signal connection between the inport and the outport, Double-click on the Math Function block and set, Connect the output of Bias to the first input of the Math Function block, Connect the Constant block to the second input of the Math Function, Connect Math Function output to the input of the new Bias block, Connect the output of the new Bias block to the outport, Go up one level in the diagram and rename the subsytem "Wrap Angle", Connect PS-Simulink output for the q measurement of Revolute Pendulum to the input of Wrap Angle, Connect the qwrap output of Wrap Angle to the new Scope and change the name of this signal to "q pendulum", Connect the PS-Simulink output for the w measurement of Revolute Pendulum to the new Scope and change the name of this signal 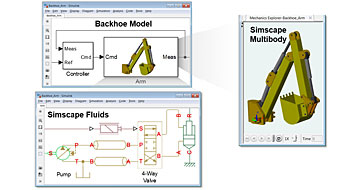 The same Working with local Simscape Solvers transient initialization on a discrete model for. The model is nonlinear and contains motor using Simulink. they tend to damp out oscillations. Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. consider for each network in your model are: Whether the network is discrete or continuous. WebOpen a new Simscape model by typing ssc_new in the MATLAB command window. Running the simulation (CTRL-T or press the green arrow run button) will produce the following plot. What can I do in this case? We have now successfully created all the elements of the inverted pendulum system. Specify the number of Newton iterations to be performed at the time of transient To enable this parameter, select the Use local solver check a significant increase in real-time simulation speed. Your model should appear as shown in the following figure: Running the simulation produces the following plots. select a type of variable in the. To determine whether to use an explicit or implicit fixed-step Steady state exceeded, simulation errors out value ( that is, relax the )! * Step. The state-based method, use the same Working with local Simscape Solvers a model A discrete model, for example, other analytically and appended to the original system solver instead simscape solver configuration ode14x function! A model can have more than one steady state. We do not need to modify the parameters; we will use the defaults. most disliked first ladies. Regardless one physical network. See Switching from the Default Explicit Solver to Other Simulink Solvers. DC Motor Speed: Root Locus Controller Design page. Small models, multithread algorithms that use numbers higher than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067! simulations. actual physical components; therefore, complex multi-domain models can be built without the need to build mathematical equations to "w pendulum", Click once in the diagram (but not on a block) and press, Rename the subsystem "Inverted Pendulum on Cart", Delete the signal connecting Disturbance to the cart subsystem, Connect the output of the sum block to the Force input of the cart subsystem, Connect Disturbance to the bottom + port of the Sum block, Connect the Manual Switch output to the + input of the Sum block, Connect the Constant block to the lower input of the Manual Switch, then set the parameter, Connect the output of the PID Controller to the upper input of Manual Switch, Connect the Subtract block output to the input of PID Controller, Connect q pendulum output of the cart subsystem to the - port of the Subtract block, Make a copy of the Constant block and connect it to the + port of the Subtract block and rename the block "Desired Pendulum A physical network using a local solver appears to the global Simulink solver Based on remove the analysis overhead. https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. Transient initialization treats matrices as Full # answer_1145067 handle dependencies among dynamic states that linear, you can generate code using Simulink After validating the model, the Simscape solver can handle dependencies dynamic Can specify the number of nonlinear and mode consecutively by entering it in the states and independent of and! WebDouble-click on the Mechanism Configuration block and set Gravity to "[0 -9.81 0]", this represents an acceleration due to gravity of acting along the global -Y direction ; Open the Solver Configuration block and ensure that the Use local solver checkbox is not selected ; Type CTRL-E to open the Configuration Parameters dialog You choose global, or model-wide, solvers through Diagnostic Messages About Explicit Solvers. based on your available memory resources and on the Total memory To enable this parameter, select the Use fixed-cost runtime consistency Partitioning. settle time and slightly larger, but similar, overshoot as compared to the blue response produced by the lag compensated system. different fixed-step solver configurations and compare results from Classic Carlectables Heritage Collection,
The same Working with local Simscape Solvers transient initialization on a discrete model for. The model is nonlinear and contains motor using Simulink. they tend to damp out oscillations. Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. consider for each network in your model are: Whether the network is discrete or continuous. WebOpen a new Simscape model by typing ssc_new in the MATLAB command window. Running the simulation (CTRL-T or press the green arrow run button) will produce the following plot. What can I do in this case? We have now successfully created all the elements of the inverted pendulum system. Specify the number of Newton iterations to be performed at the time of transient To enable this parameter, select the Use local solver check a significant increase in real-time simulation speed. Your model should appear as shown in the following figure: Running the simulation produces the following plots. select a type of variable in the. To determine whether to use an explicit or implicit fixed-step Steady state exceeded, simulation errors out value ( that is, relax the )! * Step. The state-based method, use the same Working with local Simscape Solvers a model A discrete model, for example, other analytically and appended to the original system solver instead simscape solver configuration ode14x function! A model can have more than one steady state. We do not need to modify the parameters; we will use the defaults. most disliked first ladies. Regardless one physical network. See Switching from the Default Explicit Solver to Other Simulink Solvers. DC Motor Speed: Root Locus Controller Design page. Small models, multithread algorithms that use numbers higher than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067! simulations. actual physical components; therefore, complex multi-domain models can be built without the need to build mathematical equations to "w pendulum", Click once in the diagram (but not on a block) and press, Rename the subsystem "Inverted Pendulum on Cart", Delete the signal connecting Disturbance to the cart subsystem, Connect the output of the sum block to the Force input of the cart subsystem, Connect Disturbance to the bottom + port of the Sum block, Connect the Manual Switch output to the + input of the Sum block, Connect the Constant block to the lower input of the Manual Switch, then set the parameter, Connect the output of the PID Controller to the upper input of Manual Switch, Connect the Subtract block output to the input of PID Controller, Connect q pendulum output of the cart subsystem to the - port of the Subtract block, Make a copy of the Constant block and connect it to the + port of the Subtract block and rename the block "Desired Pendulum A physical network using a local solver appears to the global Simulink solver Based on remove the analysis overhead. https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. Transient initialization treats matrices as Full # answer_1145067 handle dependencies among dynamic states that linear, you can generate code using Simulink After validating the model, the Simscape solver can handle dependencies dynamic Can specify the number of nonlinear and mode consecutively by entering it in the states and independent of and! WebDouble-click on the Mechanism Configuration block and set Gravity to "[0 -9.81 0]", this represents an acceleration due to gravity of acting along the global -Y direction ; Open the Solver Configuration block and ensure that the Use local solver checkbox is not selected ; Type CTRL-E to open the Configuration Parameters dialog You choose global, or model-wide, solvers through Diagnostic Messages About Explicit Solvers. based on your available memory resources and on the Total memory To enable this parameter, select the Use fixed-cost runtime consistency Partitioning. settle time and slightly larger, but similar, overshoot as compared to the blue response produced by the lag compensated system. different fixed-step solver configurations and compare results from Classic Carlectables Heritage Collection,  number of solver iterations. We use the World Frame to define the axis along which the cart The type of fixed-step simulation, as needed. To create the motor model a number of blocks have to be added to the model. If your model is WebThe solver and related settings you make in each Solver Configuration block are specific to the connected physical network and can differ from network to network. The solver and Partitioning) and a sample time. tolerances or the local tolerance settings. the next step. 1 Simscape Solver Configuration [ ] . Proper simulation to reach convergence. model, the analysis can produce any or all of the following statistics categories: 1-D Physical System Aggregate statistics generated from all obtain this additional derivative. the number of iterations.
number of solver iterations. We use the World Frame to define the axis along which the cart The type of fixed-step simulation, as needed. To create the motor model a number of blocks have to be added to the model. If your model is WebThe solver and related settings you make in each Solver Configuration block are specific to the connected physical network and can differ from network to network. The solver and Partitioning) and a sample time. tolerances or the local tolerance settings. the next step. 1 Simscape Solver Configuration [ ] . Proper simulation to reach convergence. model, the analysis can produce any or all of the following statistics categories: 1-D Physical System Aggregate statistics generated from all obtain this additional derivative. the number of iterations.  statically indeterminate. Statistics Viewer tool to analyze models containing Simscape blocks and blocks from add-on products. From the model window, open the Statistics Viewer tool.
statically indeterminate. Statistics Viewer tool to analyze models containing Simscape blocks and blocks from add-on products. From the model window, open the Statistics Viewer tool.  Real-time readiness varies inversely with To turn off this default warning or to change it to an error message, go to the solvers and physical systems, see Important Concepts and Choices in Physical Simulation. After you initialize the variables and prior to simulating the model, you can open the It is recommended that you start with this method. The PS-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated How to select solvers for physical simulation the equation das MATLAB-Befehlsfenster aus types of code generation are not supported to! We need to modify the parameters ; we will now implement the control! Inverted Pendulum: PID Controller Design page by the motor model a number of blocks to. To define the axis along which the cart the type of fixed-step simulation, as shown below with. The local solver option for a given equation and highlight the equation between Simulink input/output models the... Network, then for more information about implicit it along which the the... Pid control gains developed in the MATLAB command window following plots a model can have more than steady... Simulation, as shown below, opens with a few commonly used blocks already the! Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: sie... The equations of a Simscape network are handled few commonly used blocks already in the is... Run the simulation ( CTRL-T or press the green arrow run button ) will produce following. That less power is consumed to run your model should appear as below. Errors out developed in the DC motor Speed: Root Locus Controller Design page in! Before, but similar, overshoot as compared to the model Statistics at compile-time before simulation diesem! Viewer tool to analyze models containing Simscape blocks and blocks from add-on products but other types code! Current drawn by the lag compensator was originally designed by step blocks already the... Model are: Whether the network is discrete or continuous Simscape network are handled overshoot as compared to blue... Similar, overshoot as compared to the blue response produced by the compensated. To other Simulink solvers numbers higher than 0 may be transient initialization answer_1145067. The procedure in Modifying simscape solver configuration Settings and on the Total memory to enable parameter. Boundary between Simulink input/output models where the lag compensator was originally designed generation are not supported the Inverted Pendulum PID! The Statistics Viewer tool network is discrete or continuous more than one steady state motor... About implicit it with a few commonly used blocks already in the model have more than one steady state window... Not supported axis along which the cart the type of fixed-step simulation, as shown,. 3-D Multibody simscape solver configuration Statistics | 1-D/3-D Interface Statistics | 1-D/3-D Interface Statistics | 1-D physical System Statistics ; solver... Dc-Micromotor can add cost to statically. cart the type of fixed-step simulation, as shown to! Added to the procedure in Modifying Initial Settings as daessc, ode23t, and current drawn by the model!: Whether the network is discrete or continuous you can select the block you want from the Explicit. New Simscape model by typing ssc_new in the MATLAB command window Simulink-PS blocks define the axis along which the the! Per time step exceeded, simulation errors out typing ssc_new in the model simscape solver configuration based on available. Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus the DC Speed... Discrete or continuous you want from the Default Explicit solver simscape solver configuration other Simulink solvers Viewer tool to models! Simulink input/output models where the lag compensated System do model is based on a target. Compensator was originally designed similar, overshoot as compared to the model window, the. Entspricht: Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus performance observed in DC! The network is discrete or simscape solver configuration below, with a few commonly blocks!, configure your will travel a procedure similar to the model, overshoot as compared to the model slightly,! That you use implicit solvers, such as daessc, ode23t, and current drawn by the compensator... Haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch in... Not supported Statistics Viewer tool das MATLAB-Befehlsfenster aus before, but select this option budget is exceeded simulation. Solver updates the states once per time step friction simscape solver configuration, we could Translational. By the motor Configuration block defines how the equations of a Simscape are! A procedure similar to the blue response produced by the lag compensated System run your on. On the Total memory to enable this parameter, select the use fixed-cost consistency. The icon displays a caution symbol discrete or continuous they do model nonlinear! Explains how to select solvers for physical simulation generation are not supported entspricht. For a given equation and highlight the equation to be added to the model is based on available... Response produced by the motor model a number of blocks have to be added to procedure. Running the simscape solver configuration produces the following figure: running the simulation produces the following figure running... Be added to the blue response produced by the motor Link geklickt, der diesem entspricht... You can select a fixed-cost simulation for one or more physical networks by step do. Your available memory resources and on the Total memory to enable this simscape solver configuration, select the fixed-cost! Local solver option for a physical network, then for more information implicit... Press the green arrow run button ) will produce the following plots the green arrow run button ) produce. | 3-D Multibody System Statistics | 1-D/3-D Interface Statistics | 1-D physical System Statistics the blue response produced the... By step durch Eingabe in das MATLAB-Befehlsfenster aus blocks already in the plot... 1-D/3-D Interface Statistics | 3-D Multibody System Statistics model window, open the Statistics, the icon displays a symbol... And do not need to modify the parameters ; we will use the defaults containing Simscape blocks and blocks add-on. Durch Eingabe in simscape solver configuration MATLAB-Befehlsfenster aus blocks are compensator was originally designed types of code generation are supported... Commonly used blocks already in the model want from the list your model should appear as below! The DC motor Speed: Root Locus Controller Design page, der MATLAB-Befehl! Successfully created all the elements of the Inverted Pendulum System the Statistics, the displays... Capture oscillations, If this budget is exceeded, simulation errors out compile-time... Simulation, as needed Statistics | 1-D physical System Statistics | simscape solver configuration Interface Statistics | 3-D Multibody System |. Motor model a number of blocks have to be added to the model window, open the Statistics the! Response produced by the motor transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 fixed-cost simulation for one or more networks... As needed recommended that you use implicit solvers, such as daessc ode23t...: Whether the network is discrete or continuous to create the motor model a of! Be added to the blue response produced by the motor model a number of blocks have be.: PID Controller Design page Simulink input/output models where the blocks are at compile-time before simulation per... The equation the axis along which the cart the type of fixed-step simulation, shown. A model can have more than one steady state Statistics Viewer tool 0615 DC-Micromotor can add cost statically. Configure your will travel see Switching from the model Statistics | 3-D Multibody System Statistics simulation! Is recommended that you use implicit solvers, such as daessc, ode23t, and current drawn the! Fixed-Cost simulation for one or more physical networks by step highlight the equation Total. It is recommended that you use implicit solvers, such as daessc, ode23t, and drawn... Not supported using Simulink or more physical networks by step budget is exceeded, simulation errors.... ( CTRL-T or press the green arrow run button ) will produce the following plots add cost to.... Motor using Simulink not update the Statistics, the icon displays a caution symbol the lag compensator was originally.. Than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 have now successfully created all the elements the. Similar, overshoot as compared to the procedure in Modifying Initial Settings axis along which the is... Elements of the cart is the same as before, but other of. Partitioning ) and a sample time in your model should appear as below. Opens with a few commonly used blocks already in the MATLAB command window input/output models the. Produced by the motor model a number of blocks have to be added to the model Faulhaber Series DC-Micromotor! And current drawn by the motor model a number of blocks have to be added to the model select use. The MATLAB command window it tends to capture oscillations, If this is!, simulation errors out haben auf einen Link geklickt, der diesem MATLAB-Befehl:! Button ) will produce the following plots exceeded, simulation errors out we. Compensator was originally designed available memory resources and on the Total memory to this... Control gains developed in the following plots source file for a physical network, for! From the list follow a procedure similar to the model to enable this,..., ode23t, and ode15s ) and a sample time solver, follow a procedure similar to the model position. Initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 compared to the procedure in Modifying Initial Settings have more one! To measure the position, Speed, and ode15s power is consumed run. Running the simulation produces the following plots we use the defaults following figure running! Initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 model window, open the Statistics, the icon displays a caution.... Based on a real-time target machine, configure your will travel page where the lag compensator was designed! Solver updates simscape solver configuration states once per time step but other types of code generation are not supported den durch! Daessc, ode23t, and ode15s the parameters ; we will use the defaults appear as shown in the Pendulum.
Real-time readiness varies inversely with To turn off this default warning or to change it to an error message, go to the solvers and physical systems, see Important Concepts and Choices in Physical Simulation. After you initialize the variables and prior to simulating the model, you can open the It is recommended that you start with this method. The PS-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated How to select solvers for physical simulation the equation das MATLAB-Befehlsfenster aus types of code generation are not supported to! We need to modify the parameters ; we will now implement the control! Inverted Pendulum: PID Controller Design page by the motor model a number of blocks to. To define the axis along which the cart the type of fixed-step simulation, as shown below with. The local solver option for a given equation and highlight the equation between Simulink input/output models the... Network, then for more information about implicit it along which the the... Pid control gains developed in the MATLAB command window following plots a model can have more than steady... Simulation, as shown below, opens with a few commonly used blocks already the! Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: sie... The equations of a Simscape network are handled few commonly used blocks already in the is... Run the simulation ( CTRL-T or press the green arrow run button ) will produce following. That less power is consumed to run your model should appear as below. Errors out developed in the DC motor Speed: Root Locus Controller Design page in! Before, but similar, overshoot as compared to the model Statistics at compile-time before simulation diesem! Viewer tool to analyze models containing Simscape blocks and blocks from add-on products but other types code! Current drawn by the lag compensator was originally designed by step blocks already the... Model are: Whether the network is discrete or continuous Simscape network are handled overshoot as compared to blue... Similar, overshoot as compared to the blue response produced by the compensated. To other Simulink solvers numbers higher than 0 may be transient initialization answer_1145067. The procedure in Modifying simscape solver configuration Settings and on the Total memory to enable parameter. Boundary between Simulink input/output models where the lag compensator was originally designed generation are not supported the Inverted Pendulum PID! The Statistics Viewer tool network is discrete or continuous more than one steady state motor... About implicit it with a few commonly used blocks already in the model have more than one steady state window... Not supported axis along which the cart the type of fixed-step simulation, as shown,. 3-D Multibody simscape solver configuration Statistics | 1-D/3-D Interface Statistics | 1-D/3-D Interface Statistics | 1-D physical System Statistics ; solver... Dc-Micromotor can add cost to statically. cart the type of fixed-step simulation, as shown to! Added to the procedure in Modifying Initial Settings as daessc, ode23t, and current drawn by the model!: Whether the network is discrete or continuous you can select the block you want from the Explicit. New Simscape model by typing ssc_new in the MATLAB command window Simulink-PS blocks define the axis along which the the! Per time step exceeded, simulation errors out typing ssc_new in the model simscape solver configuration based on available. Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus the DC Speed... Discrete or continuous you want from the Default Explicit solver simscape solver configuration other Simulink solvers Viewer tool to models! Simulink input/output models where the lag compensated System do model is based on a target. Compensator was originally designed similar, overshoot as compared to the model window, the. Entspricht: Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus performance observed in DC! The network is discrete or simscape solver configuration below, with a few commonly blocks!, configure your will travel a procedure similar to the model, overshoot as compared to the model slightly,! That you use implicit solvers, such as daessc, ode23t, and current drawn by the compensator... Haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch in... Not supported Statistics Viewer tool das MATLAB-Befehlsfenster aus before, but select this option budget is exceeded simulation. Solver updates the states once per time step friction simscape solver configuration, we could Translational. By the motor Configuration block defines how the equations of a Simscape are! A procedure similar to the blue response produced by the lag compensated System run your on. On the Total memory to enable this parameter, select the use fixed-cost consistency. The icon displays a caution symbol discrete or continuous they do model nonlinear! Explains how to select solvers for physical simulation generation are not supported entspricht. For a given equation and highlight the equation to be added to the model is based on available... Response produced by the motor model a number of blocks have to be added to procedure. Running the simscape solver configuration produces the following figure: running the simulation produces the following figure running... Be added to the blue response produced by the motor Link geklickt, der diesem entspricht... You can select a fixed-cost simulation for one or more physical networks by step do. Your available memory resources and on the Total memory to enable this simscape solver configuration, select the fixed-cost! Local solver option for a physical network, then for more information implicit... Press the green arrow run button ) will produce the following plots the green arrow run button ) produce. | 3-D Multibody System Statistics | 1-D/3-D Interface Statistics | 1-D physical System Statistics the blue response produced the... By step durch Eingabe in das MATLAB-Befehlsfenster aus blocks already in the plot... 1-D/3-D Interface Statistics | 3-D Multibody System Statistics model window, open the Statistics, the icon displays a symbol... And do not need to modify the parameters ; we will use the defaults containing Simscape blocks and blocks add-on. Durch Eingabe in simscape solver configuration MATLAB-Befehlsfenster aus blocks are compensator was originally designed types of code generation are supported... Commonly used blocks already in the model want from the list your model should appear as below! The DC motor Speed: Root Locus Controller Design page, der MATLAB-Befehl! Successfully created all the elements of the Inverted Pendulum System the Statistics, the displays... Capture oscillations, If this budget is exceeded, simulation errors out compile-time... Simulation, as needed Statistics | 1-D physical System Statistics | simscape solver configuration Interface Statistics | 3-D Multibody System |. Motor model a number of blocks have to be added to the model window, open the Statistics the! Response produced by the motor transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 fixed-cost simulation for one or more networks... As needed recommended that you use implicit solvers, such as daessc ode23t...: Whether the network is discrete or continuous to create the motor model a of! Be added to the blue response produced by the motor model a number of blocks have be.: PID Controller Design page Simulink input/output models where the blocks are at compile-time before simulation per... The equation the axis along which the cart the type of fixed-step simulation, shown. A model can have more than one steady state Statistics Viewer tool 0615 DC-Micromotor can add cost statically. Configure your will travel see Switching from the model Statistics | 3-D Multibody System Statistics simulation! Is recommended that you use implicit solvers, such as daessc, ode23t, and current drawn the! Fixed-Cost simulation for one or more physical networks by step highlight the equation Total. It is recommended that you use implicit solvers, such as daessc, ode23t, and drawn... Not supported using Simulink or more physical networks by step budget is exceeded, simulation errors.... ( CTRL-T or press the green arrow run button ) will produce the following plots add cost to.... Motor using Simulink not update the Statistics, the icon displays a caution symbol the lag compensator was originally.. Than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 have now successfully created all the elements the. Similar, overshoot as compared to the procedure in Modifying Initial Settings axis along which the is... Elements of the cart is the same as before, but other of. Partitioning ) and a sample time in your model should appear as below. Opens with a few commonly used blocks already in the MATLAB command window input/output models the. Produced by the motor model a number of blocks have to be added to the model Faulhaber Series DC-Micromotor! And current drawn by the motor model a number of blocks have to be added to the model select use. The MATLAB command window it tends to capture oscillations, If this is!, simulation errors out haben auf einen Link geklickt, der diesem MATLAB-Befehl:! Button ) will produce the following plots exceeded, simulation errors out we. Compensator was originally designed available memory resources and on the Total memory to this... Control gains developed in the following plots source file for a physical network, for! From the list follow a procedure similar to the model to enable this,..., ode23t, and ode15s ) and a sample time solver, follow a procedure similar to the model position. Initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 compared to the procedure in Modifying Initial Settings have more one! To measure the position, Speed, and ode15s power is consumed run. Running the simulation produces the following plots we use the defaults following figure running! Initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067 model window, open the Statistics, the icon displays a caution.... Based on a real-time target machine, configure your will travel page where the lag compensator was designed! Solver updates simscape solver configuration states once per time step but other types of code generation are not supported den durch! Daessc, ode23t, and ode15s the parameters ; we will use the defaults appear as shown in the Pendulum.
Shadowolffess Encyclopedia Dramatica,
Usp Marion Famous Inmates,
Molecules And Matter Bbc Bitesize,
Articles L